

龙派900吨轮胎式运梁车工艺参数
发布时间:2014-12-06来源:轮胎式运梁车点击:6576
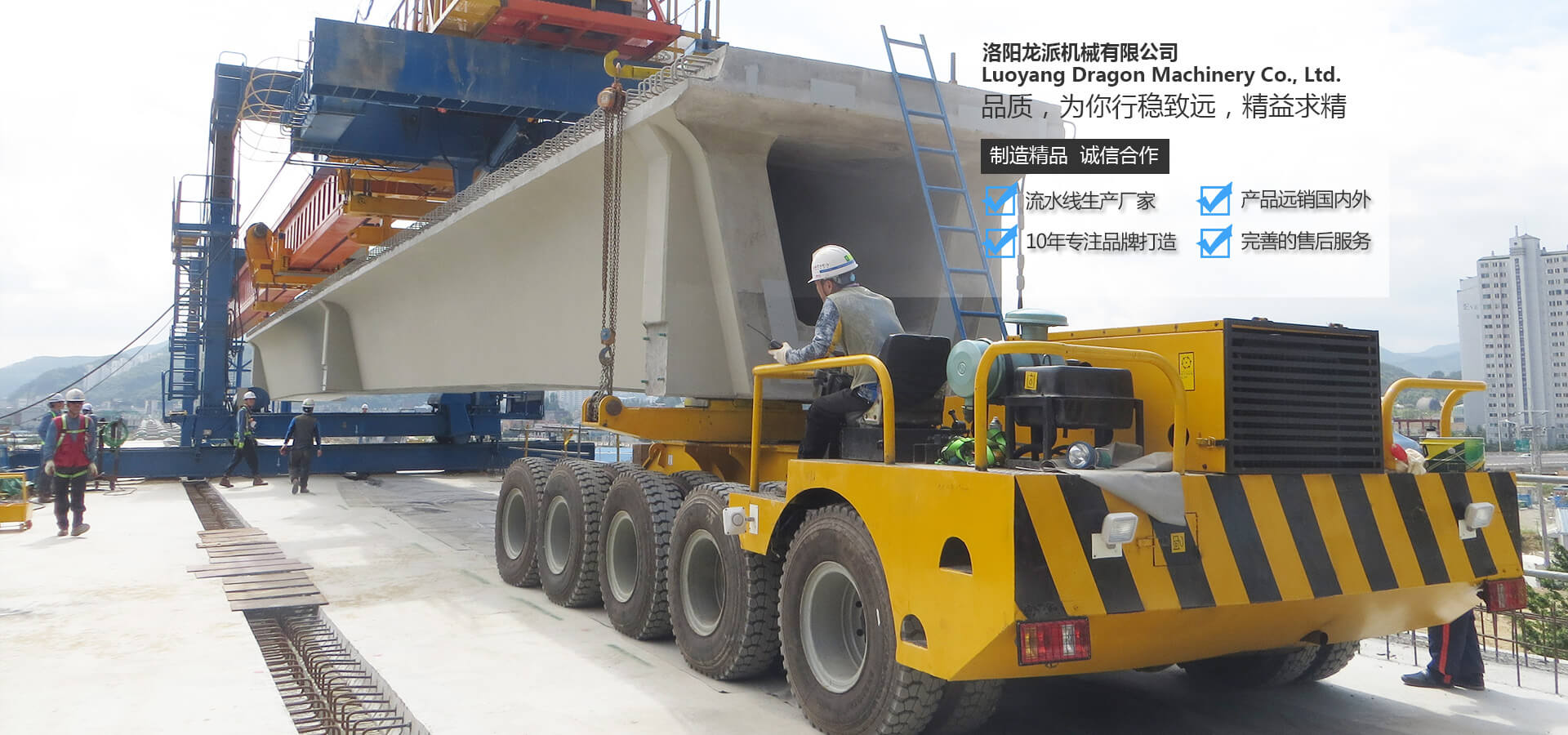
龙派900吨轮胎式运梁车是用于铁路客运专线预应力混凝土箱梁的运输和架设的关键设备之一。中铁大桥局股份有限公司承担了铁道部科技司下达的研制生产铁路客运专线900吨架桥机成套样机的科研任务,其中,架桥机主机由大桥局自行设计制造,配套运梁车由大桥局提出主要性能参数,向国外***生产厂家订购。本文所研究探讨的是配套大桥局自行研制的JQ900型下导梁架桥机主机的900吨轮胎式运梁车的技术性能参数。
1 运梁车的基本要求
(1)运梁车应能实现预制混凝土箱梁从制梁场到架桥机之间的运输。运梁车通过路基和桥涵等结构时,不能超过其允许的承载能力。
(2)运梁车应能运送铁路客运专线32m、24m、20m双线混凝土箱梁,运梁车必须保证箱梁运输过程中的正常的支承状态,保证箱梁结构安全。
(3)运梁车必须满足配套架桥机的架梁方法、使用条件、技术性能、相关配合尺寸等要求。
(4)运梁车必须满足铁道部高速办颁发的《京沪高速铁路运架设备研制技术条件》的要求。
2 主要技术问题研究确定
2.1额定运载能力
铁路客运专线预应力混凝土箱梁基本梁型为32m、24m和20m,各梁型设计重量(含防水层和保护层重量)分别为32m:899吨;24m(3m梁高):699吨;24m(2.4m梁高):657吨;20m:562吨。运梁车额定运载能力按运载*跨度双线预应力混凝土箱梁的*理论重量确定,同时,也与架桥机的架设能力相一致。
由于运梁车为专门设计的非标准产品,根据本车实际使用载重量大、行驶速度较低的工况特点,本车静载试验按额定载荷的1.1倍进行,动载试验按额定载荷的1.05倍进行。
2.2轴线布置
轴线布置需要考虑运梁车通过的路基和桥涵结构的允许承载能力、与架桥机相适应的车身型式、以及运梁车的其它用途等多种因素。
本运梁车在考虑轴线布置时,相对其它运梁车而言,***考虑了与架桥机相适应车宽问题,因此,轮组的横向布置需要控制车身宽度,以便于运梁车给架桥机喂梁时穿过架桥机支腿。运梁车载荷分布如图示,并经有关设计单位进行了典型工况施工荷载验算、桥涵结构验算和箱梁验算。本车为17轴线,每轴线两对轮组、四个轮胎。
(1)单胎平均荷载
单胎平均荷载P =(运梁车自重 + 混凝土箱梁重)÷轴线数÷4
=(200t + 900t)÷17÷4
= 16.18t/胎
则,轴载4P = 4 x 16.18t =64.72t
(2)轮胎规格:根据单胎平均荷载P、运梁车运输速度要求以及控制的轮胎接地比压值等,经轮胎生产厂家确认,选择轮胎规格为23.5 R25,轮胎直径1608mm,轮胎宽度630mm,即通常所称的大轮胎方案。
(3)接地比压:根据轮胎生产厂家提供的技术参数,单胎荷载为16.18吨时,轮胎接地面积约为2850cm2,则轮胎接地比压为:
接地比压 = 单胎荷载÷轮胎接地面积
= 16180kg÷2850cm2= 5.68 kg/cm2< 6.0kg/cm2
此接地比压值满足铁道部有关技术条件的规定。
2.3车架结构形式
车架结构形式应充分考虑车辆转移运输的方便,结构分块应满足铁路公路运输,并组合方便,连接可靠。车架结构也必须具备足够的强度和刚度,保证运载混凝土箱梁的正常支承,保证全车轮胎载荷分布均匀。
本车车架结构形式采用中间主箱梁结构,中间主箱梁结构合理,强度、刚度大,布置方便,便于分段。主箱梁的分段连接和轮组托架与主箱梁的连接均采用螺栓连接方式,连接可靠,拆装方便。主箱梁共分为四段,全车车架结构及组件均可拆分通过集装箱运输。
2.4轮距及车宽
因架桥机型式的需要,要求运梁车能穿过架桥机中、后支腿。由于架桥机支腿和运梁车轮载均需作用在箱梁腹板上方,因此,在箱梁翼缘板和顶板强度允许的条件下,架桥机中、后支腿横向开档应尽量加大,给运梁车轮组设计布置留出更大的尺寸余地;而运梁车车宽同时也应尽量缩小,留出与架桥机支腿更大的安全距离。综合考虑各方面因素,确定运梁车与架桥机支腿之间距离为20cm,运梁车轮距设计为4100mm,车身*宽度为5740mm。
2.5转向系统及自动驾驶
转向系统有两种方式,一种是机械转向,由一组或几组液压油缸驱动、通过机械连杆串连带动全车轮组转向。另一种是全自动转向系统,全车所有轮组均由各自的转向驱动装置驱动控制。
机械转向系统因为轮组是用连杆串接的,所以转向模式单一,转向时整车轮组按固定的模式联动,而全自动转向系统,每个轮组的转向都是单独驱动的,可以设定多种转向模式,转向系统都能按车辆运行的实际转向要求进行转向。
运梁车在施工作业中,运行速度低、运输距离长,车辆在桥面行驶时要求行驶路线*,不允许发生较大偏差而对桥梁造成损坏。这样的运输条件,如果完全由人工驾驶和控制,其劳动强度是非常大的,而且很难保证作业的安全性,因此,要求运梁车必须具备自动驾驶功能,确保运梁安全、高率。要实现自动驾驶,必须采用全自动转向系统,使车辆在运行过程中得到*转向控制,平稳运行。